

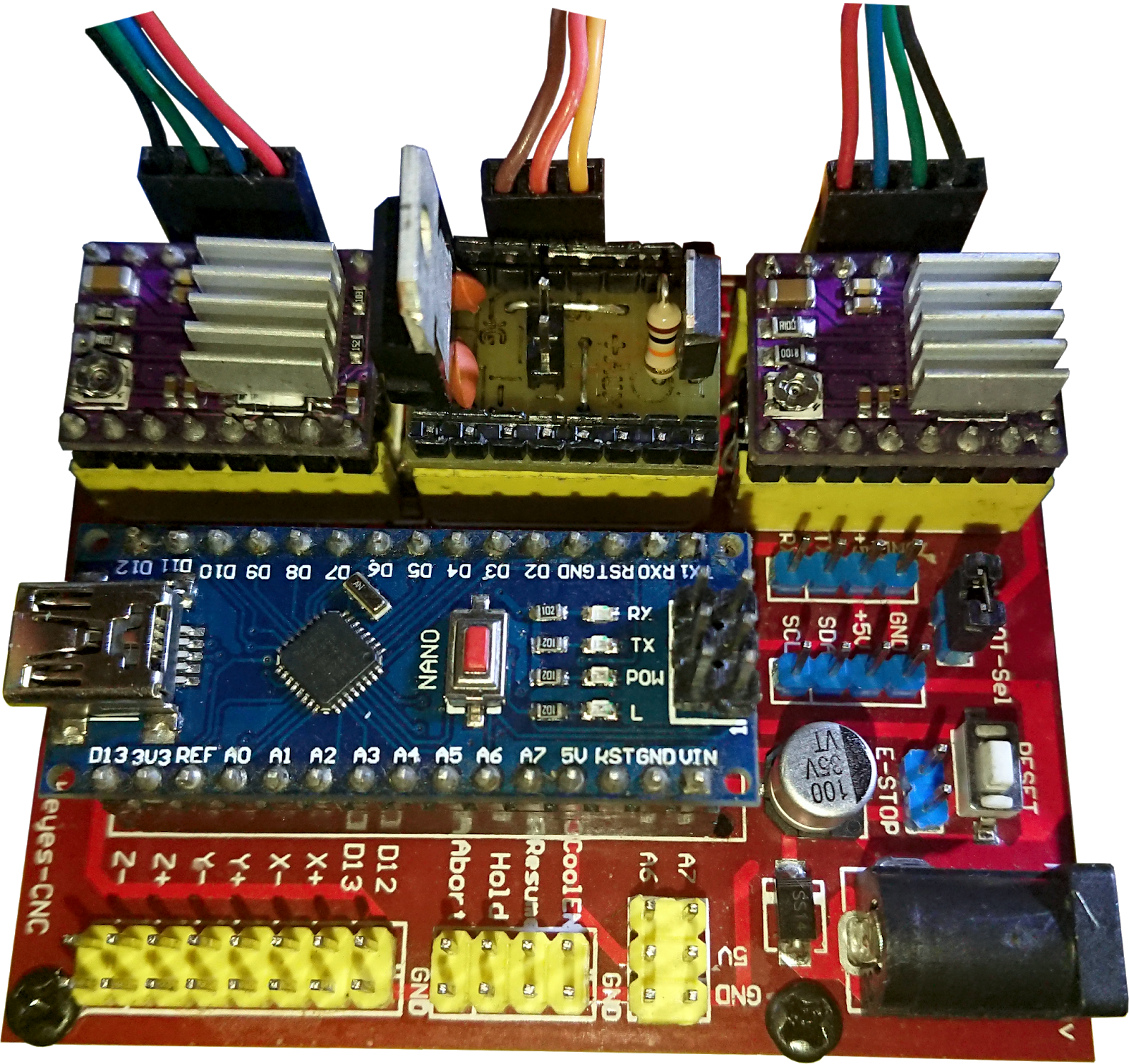
One the web are Chinese cloned Keyes CNC Shields for the Arduino NANO.
They are cheep and good value. BUT.
If you want to set Micro Stepping as they are, you can't.
Who ever cloned/made this shield made a mistake and put the pins that should go to Vcc, to GND.
As the pins that set the Micro Step Mode are already pulled down to GND internally as default, and to change there state, they need pulling up to Vcc.
Three ways to check you have a clone:
1. The original Shield by Keyes has a blackish solder mask. (I have not had an original to check if it is correct and was copied wrong, or the original is also wrong.)
2. Some text on the board is incorrect.
Should be marked D9 and D10
Should say Control.
3. Pins are connected to the ground rail. (The bit that matters)
The first step to put things right, is to isolate the pins from the GND rail.
This needs doing in Eight places.
First Two are on the top side:
I found, warming the header pins, made it easier to slide off the plastic supports.
The next Six are underneath:







After isolating the pins, check that they
Are Isolated, using a circuit tester.
Check that they are no longer connected to ground.
Isolating the pins from the GND track has separated the GND track and need reconnecting in two places.
Solder two pieces of tined copper wire in the place shown above.
Now the isolated pins need connecting to the Vcc circuit.
Luckily there are pins connected to this circuit close by to the isolated pins.
Using tined copper wire make solder bridges to these pins as shown:
Be sure to keep the tined wire away from the track that runs under the bridge.
GRBL Code
I write my own code when using this board,
BUT.
If you are going to use
gbrl firmware some changes to the code need making.
When you download the
gbrl-master and unzip the file, in the folder you will find a folder called
grbl, inside that folder you find a folder called
cpu_map, inside that folder you will find two files,
cpu_map_atmega328p.h and
cpu_map_atmega2560.h.
As this shield is for the Arduino
NANO, the file that needs changing is:
cpu_map_atmega328p.h.
Open the file and you should see as shown (or similar).

There are 2 ways to do this:
1. Only use cloned shield. (If you don't intend to use a shield that is configured correctly).
Using screenshot as reference:
Line 39, change 2 to 5.
Line 40, change 3 to 6.
Line 41, change 4 to 7.
Line 47, change 5 to 2.
Line 48, change 6 to 3.
Line 49, change 7 to 4.
2. If you want to be able to quickly change from one type of shield to the other.
I will do this higher line numbers first so original line numbers (screenshot) I reference stay same for a time.
Lines 47,48 & 49 need replacing with:
#ifdef KEYS_CLONE
#define X_DIRECTION_BIT 2
// CLONE NANO Digital Pin 2
#define Y_DIRECTION_BIT 3
// CLONE NANO Digital Pin 3
#define Z_DIRECTION_BIT 4
// CLONE NANO Digital Pin 4
#else
#define X_DIRECTION_BIT 5
// Uno Digital Pin 5
#define Y_DIRECTION_BIT 6
// Uno Digital Pin 6
#define Z_DIRECTION_BIT 7
// Uno Digital Pin 7
#endif // KEYS_CLONE
Lines 39, 40 & 41need replacing with:
#ifdef KEYS_CLONE
#define X_STEP_BIT 5 // CLONE NANO Digital Pin 5
#define Y_STEP_BIT 6 // CLONE NANO Digital Pin 6
#define Z_STEP_BIT 7 // CLONE NANO Digital Pin 7
#else
#define X_STEP_BIT 2 // Uno Digital Pin 2
#define Y_STEP_BIT 3 // Uno Digital Pin 3
#define Z_STEP_BIT 4 // Uno Digital Pin 4
#endif // KEYS_CLONE
After line 30 insert a variable that can be changed to decide which shied is used?
#define GRBL_PLATFORM "Atmega328p"
#define KEYS_CLONE true
Changing the value of KEYS_CLONE:
true = using clone
false = using correct shield.
If you like what I have done, or want to know more.
Please leave a comment below.














































{kind=link}